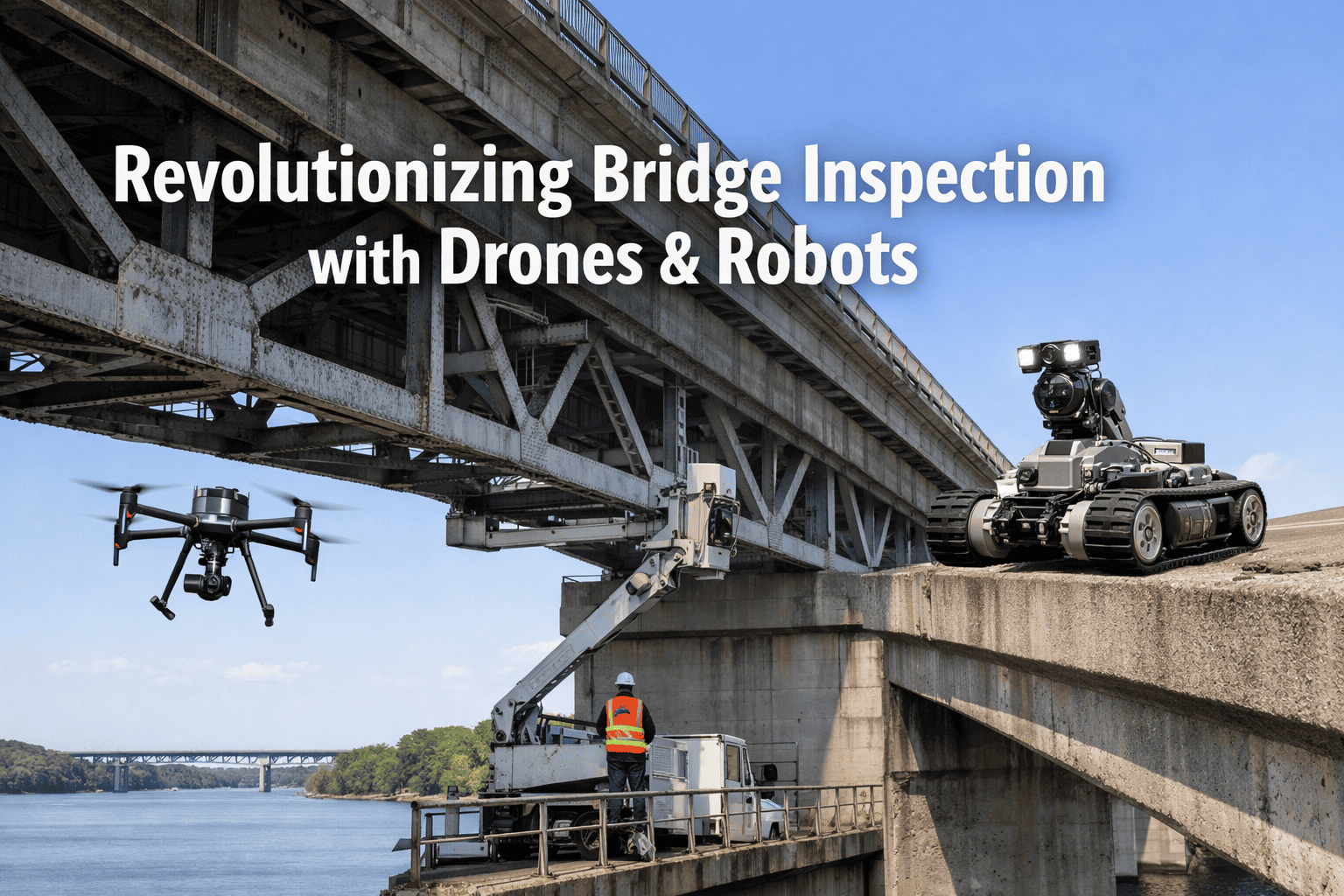
Bridge inspections have historically meant lane closures, rope-access teams dangling over traffic, and weeks of disrupted commutes — all for a visual survey that still misses subsurface cracking and early-stage corrosion. Drone and robotic inspection technology is eliminating every one of those constraints. Today, autonomous systems scan bridge decks, pier columns, and under-deck soffit panels in hours rather than days — producing millimeter-resolution imaging, thermal data, and structural analytics that human inspectors on ropes cannot match. Book a demo to see how Oxmaint manages drone and robotic bridge inspection workflows end to end.
The Problems With Conventional Bridge Inspection
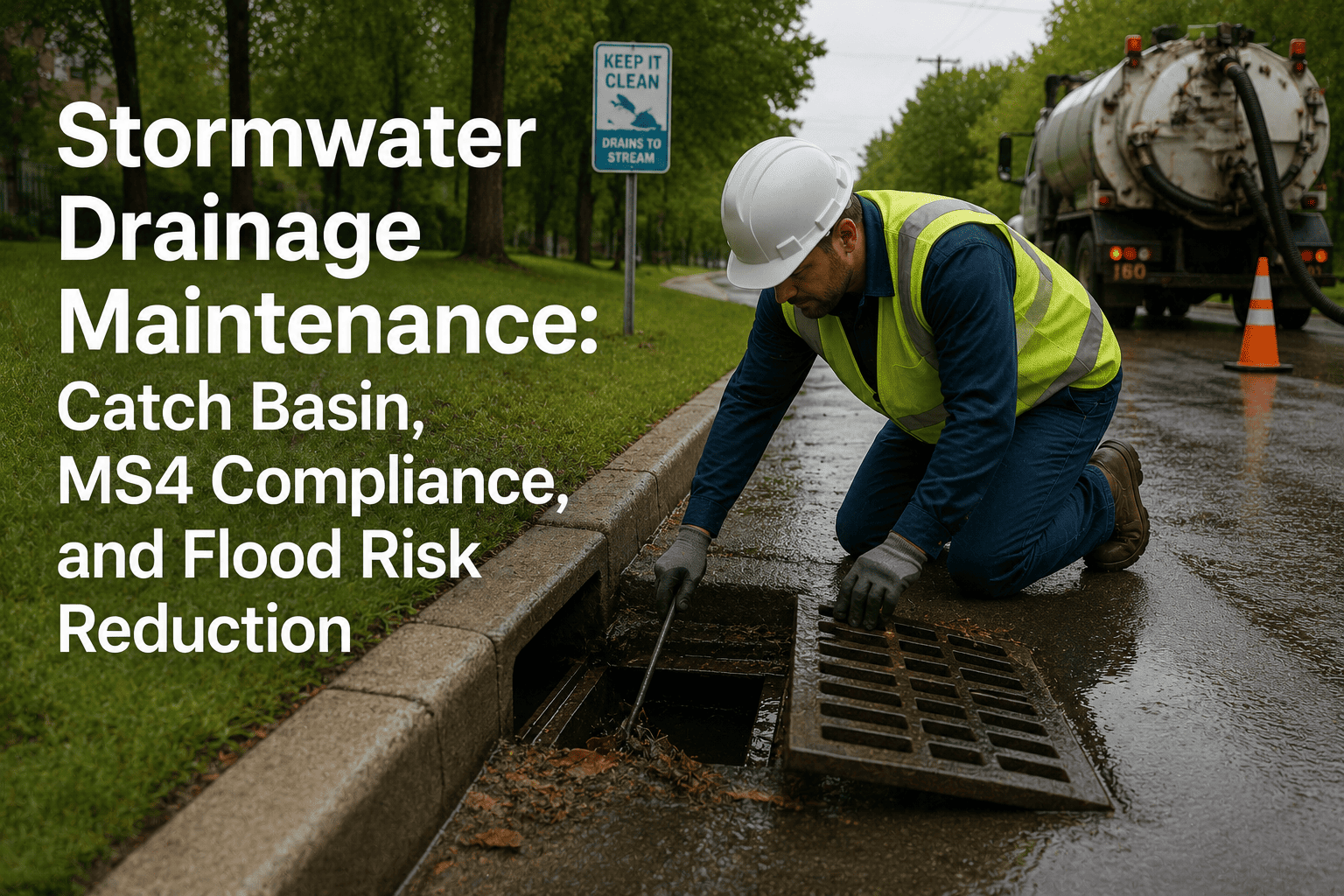
Conventional under-bridge inspections require lane closures, snooper vehicles, and rope access crews working over live traffic. A single inspection on a busy urban bridge can cause hours of congestion and exposes teams to significant fall and struck-by hazards.
Human inspectors on rope access or elevated platforms produce subjective, point-in-time observations. Subsurface cracking, early delamination, and corrosion behind surface coatings are routinely missed until they progress to structurally significant levels — by which point repair costs have multiplied.
Biennial FHWA inspection cycles mean a bridge may go 24 months between assessments. Seasonal loading, scour events, and impact damage can create structural changes that remain undocumented until the next scheduled inspection — creating liability exposure and missed early-intervention windows.
Drone Inspection: What Systems Can Now Do
Robotic Systems: Where Drones Cannot Reach
Magnetic-tracked crawlers traverse vertical and overhead steel surfaces while conducting ultrasonic thickness measurements, acoustic emission testing, and surface corrosion scanning. Deployable without human access to confined or high-elevation areas.
Remotely operated underwater vehicles inspect submerged bridge foundations for scour erosion, impact damage, and material loss — the zone responsible for a significant proportion of catastrophic bridge failures and the one most difficult to assess with traditional methods.
Vehicle-mounted ground-penetrating radar systems scan full deck widths at traffic speed — mapping rebar corrosion, delamination depth, and deck thickness variation without requiring lane closure or surface preparation.
Machine learning models trained on bridge defect libraries automatically classify crack types, measure corrosion extent, and flag high-priority areas from drone and camera footage — reducing post-inspection analysis time from weeks to hours.
Manage Drone and Robot Inspection Data in One CMMS Platform
Oxmaint connects drone survey outputs, robotic inspection findings, and defect work orders into a single bridge asset management workflow — from first detection to repair completion and compliance reporting.
Inspection Technology by Bridge Zone
How Oxmaint Closes the Loop: From Inspection to Work Order
Drone imagery, thermal scans, LiDAR point clouds, and robotic sensor readings imported into the Oxmaint asset record for the specific bridge span, pier, or zone.
AI-assisted analysis flags defect type, severity, and GPS location. Critical findings auto-generate priority work orders. Non-urgent items enter the scheduled maintenance queue.
Each work order carries the originating inspection image, defect coordinates, and recommended repair method. Contractors receive complete context without additional site visits.
Post-repair drone re-flight or robotic re-scan verifies defect resolution. Comparison imaging logged against the original detection — producing the documented condition evidence trail required for FHWA and state DOT compliance.
Before and After: Bridge Inspection Operations
Related Roads and Transportation Resources
Frequently Asked Questions
Drone-based bridge inspections are accepted as a supplemental tool under FHWA's bridge inspection guidelines and are increasingly recognised by state DOTs as part of the routine inspection record. When drone survey data is logged against a georeferenced asset record in a CMMS — with timestamped imagery, defect classifications, and inspector attribution — the output meets the documentation requirements of the National Bridge Inspection Standards (NBIS). Drone data does not currently replace the biennial routine inspection in most jurisdictions, but it substantially enriches the condition record between cycles and supports element-level condition rating updates.
Under-bridge soffit inspection requires a drone with omnidirectional obstacle avoidance, a tethered power option for extended flight time in GPS-denied environments, and a camera capable of close-range imaging at 0.2 to 0.5 metre standoff distances. Small, ducted-fan drones such as the Elios series by Flyability are purpose-designed for this confined-space bridge application. For open under-deck spans, conventional inspection-class drones with gimbal-stabilised cameras and thermal payloads are adequate. The specific platform selection should be matched to the bridge geometry and the defect types targeted in the inspection programme.
Oxmaint ingests inspection data through a structured import workflow — accepting geotagged image sets, thermal scan exports, LiDAR point cloud files, and structured defect reports from common drone inspection platforms and analysis software. Each imported dataset is linked to the specific bridge asset record and inspection event. Defects identified in the analysis are converted into Oxmaint work orders with the source image, GPS coordinates, defect classification, and priority rating pre-populated. No re-entry of inspection findings into a separate system is required.
Underwater ROV capability in challenging conditions depends heavily on vehicle thrust, tether management, and sensor selection. In high-flow conditions, work-class ROVs with vectored thrusters can maintain station-keeping for structural inspection at moderate current velocities, though deployment planning must account for scour exposure and vehicle drift risk. In highly turbid water where optical visibility is near zero, acoustic imaging sonar and multibeam sonar systems replace optical cameras — producing seabed and substructure geometry data without requiring visual clarity. These deployments are more complex and typically require specialist ROV operators with bridge underwater inspection certification.
Turn Drone and Robotic Inspection Data Into Maintenance Action
Oxmaint connects bridge inspection findings from any technology — drone, robotic, or conventional — into structured work orders, condition trend tracking, and FHWA-compliant documentation. No data silos, no manual re-entry.